Link 1 down while connecting Orange PI to Pixhawk - Companion
4.5 (103) · € 19.00 · En Stock
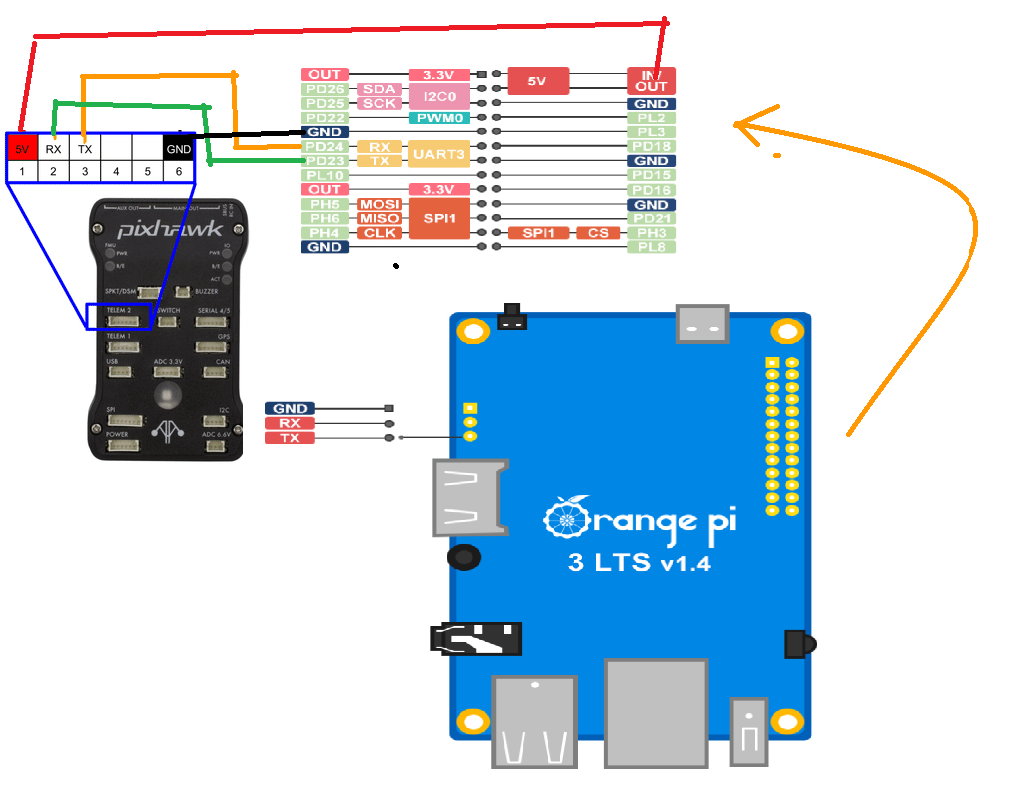
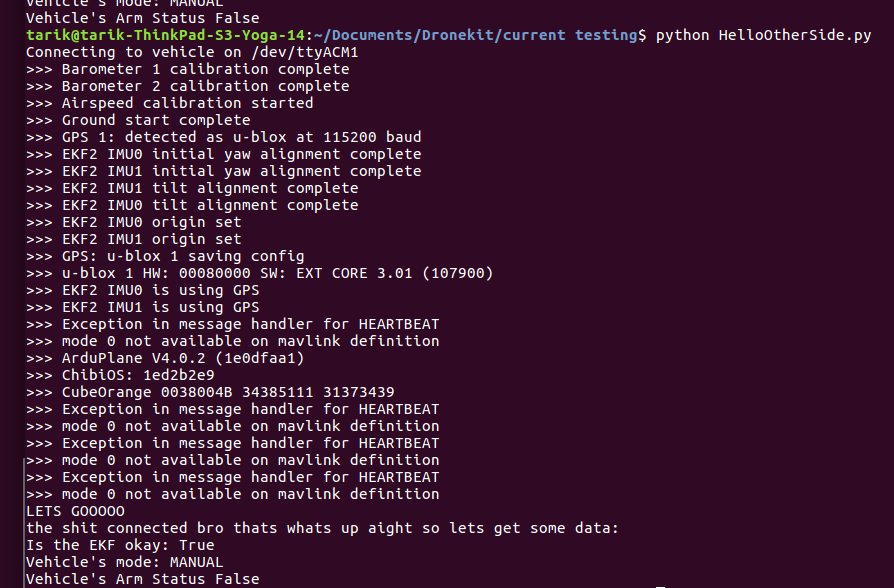
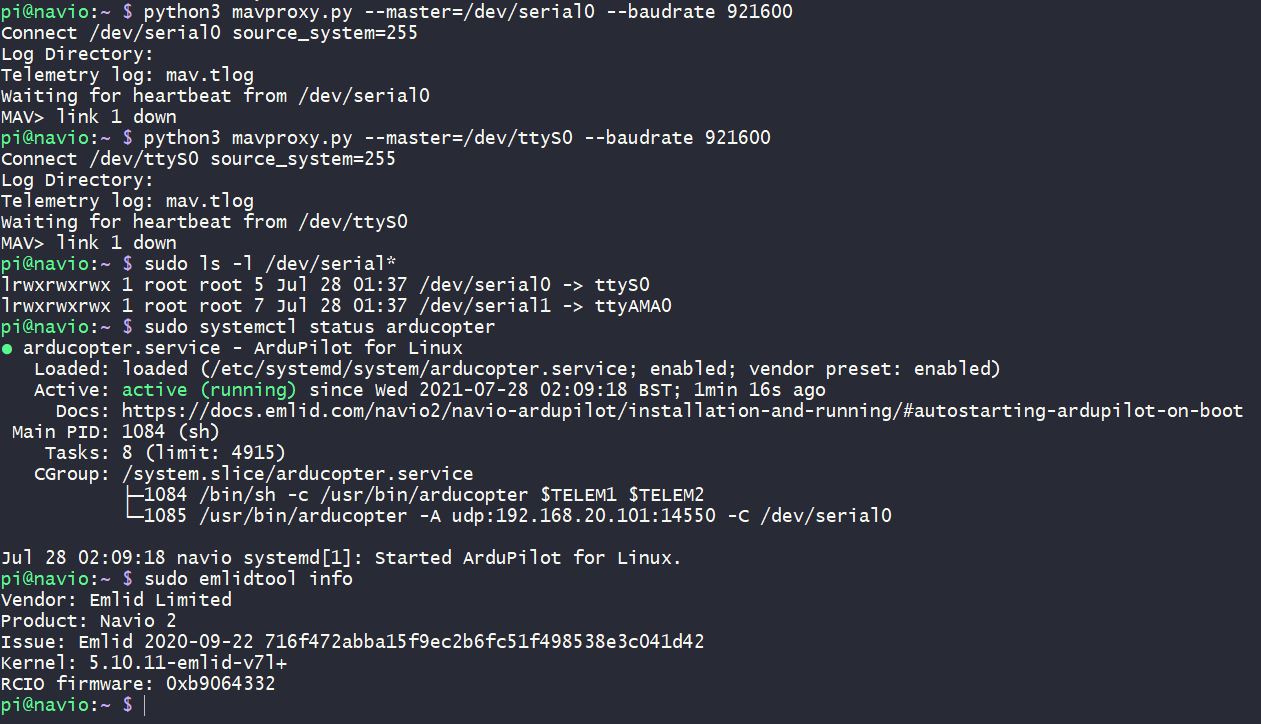
Hi everyone, I’m trying to connect my Orange PI 3 to Pixhawk with telemetry. I make the connection below: I also enable the uart from the config file according to user mauel of the Orange PI and my UART3 port is active: When I run “mavproxy.py” in the command line I’m getting the output below: Auto-detected serial ports are: /dev/ttyS0 /dev/ttyS1 /dev/ttyS2 /dev/ttyS3 /dev/ttyS4 /dev/ttyS5 Those ports are exist but only the ttyS0 and ttyS3 active. My connections are true, I even tried
Using Dronekit with CubePilot Orange/ADS-B Carrier board

PX4 Research Log [8] – Hardware In the Loop (HITL) Simulation

CubePilot The Cube Purple Set (Mini Carrier) - RobotShop

Waiting for the vehicle connection - QGroundControl - Blue

CubePilot The Cube Orange Standard Set (ADS-B Carrier Board

Waiting for the vehicle connection - QGroundControl - Blue
Is it possible to connect raspberry pi to ardupilot and make them

Raspberry Pi Free Pascal Lazarus Delphi

Connecting Raspberry Pi w/ Pixhawk and Communicating via MAVLink

Pixhawk 6C to RPi 4 connection - APSync / Companion Computers

PixhawkFamily

T265 adding an auxiliary Serial & Power port for embedded systems
MavProxy.py link 1 down w/ RasPi - APSync / Companion Computers